

先明确一个概念叫dict,又称字典(dictionary)或映射(map),是集合的一种;这种集合中每个元素都是KV键值对。
字典dict 在 Redis 中的应用广泛, 使用频率可以说和 SDS 以及双端链表不相上下, 基本上各个功能模块都有用到字典的地方。
其中, 字典dict的主要用途有以下两个:
- 实现数据库键空间(key space);
- 用作 hash 键的底层实现之一;
这里我们重点讨论 hash 键的底层实现。
Redis 的 hash 键使用以下两种数据结构作为底层实现:
- 压缩列表ziplist ;
- 字典dict;
因为压缩列表 比字典更节省内存,所以程序在创建新 Hash 键时,默认使用压缩列表作为底层实现, 当有需要时,才会将底层实现从压缩列表转换到字典。
ziplist 是为 Redis 节约内存而开发的、非常节省内存的双向链表。
压缩链表转成字典(ziplist->dict)的条件
同时满足以下两个条件,hash 键才会使用ziplist:
- key和value 长度都小于64
- 键值对数小于512
以上两个条件可以在Reids配置文件中修改hash-max-ziplist-value选项和hash-max-ziplist-entries选项。
dict的结构
/*
* 字典
*
* 每个字典使用两个哈希表,用于实现渐进式 rehash
*/typedef struct dict {
// 特定于类型的处理函数
dictType *type;
// 类型处理函数的私有数据
void *privdata;
// 哈希表(2 个)
dictht ht[2];
// 记录 rehash 进度的标志,值为 -1 表示 rehash 未进行
int rehashidx;
// 当前正在运作的安全迭代器数量
int iterators;
} dict;
typedef struct dictType {
unsigned int (*hashFunction)(const void *key);
void *(*keyDup)(void *privdata, const void *key);
void *(*valDup)(void *privdata, const void *obj);
int (*keyCompare)(void *privdata, const void *key1, const void *key2);
void (*keyDestructor)(void *privdata, void *key);
void (*valDestructor)(void *privdata, void *obj);
} dictType;结合上面的代码,可以很清楚地看出dict的结构。一个dict由如下若干项组成:
- dictType *type;一个指向dictType结构的指针(type)。它通过自定义的方式使得dict的key和value能够存储任何类型的数据。
- void *privdata;一个私有数据指针(privdata)。由调用者在创建dict的时候传进来。
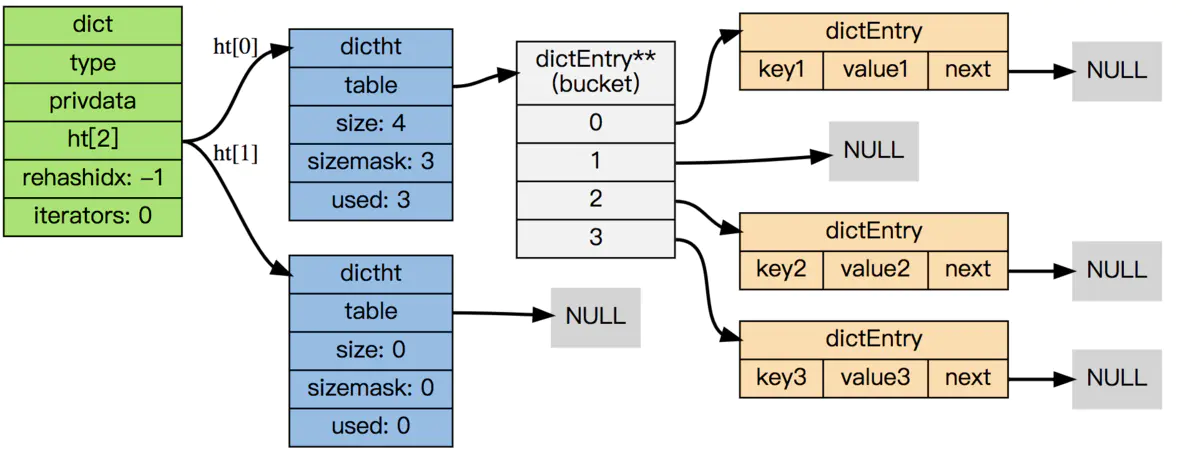
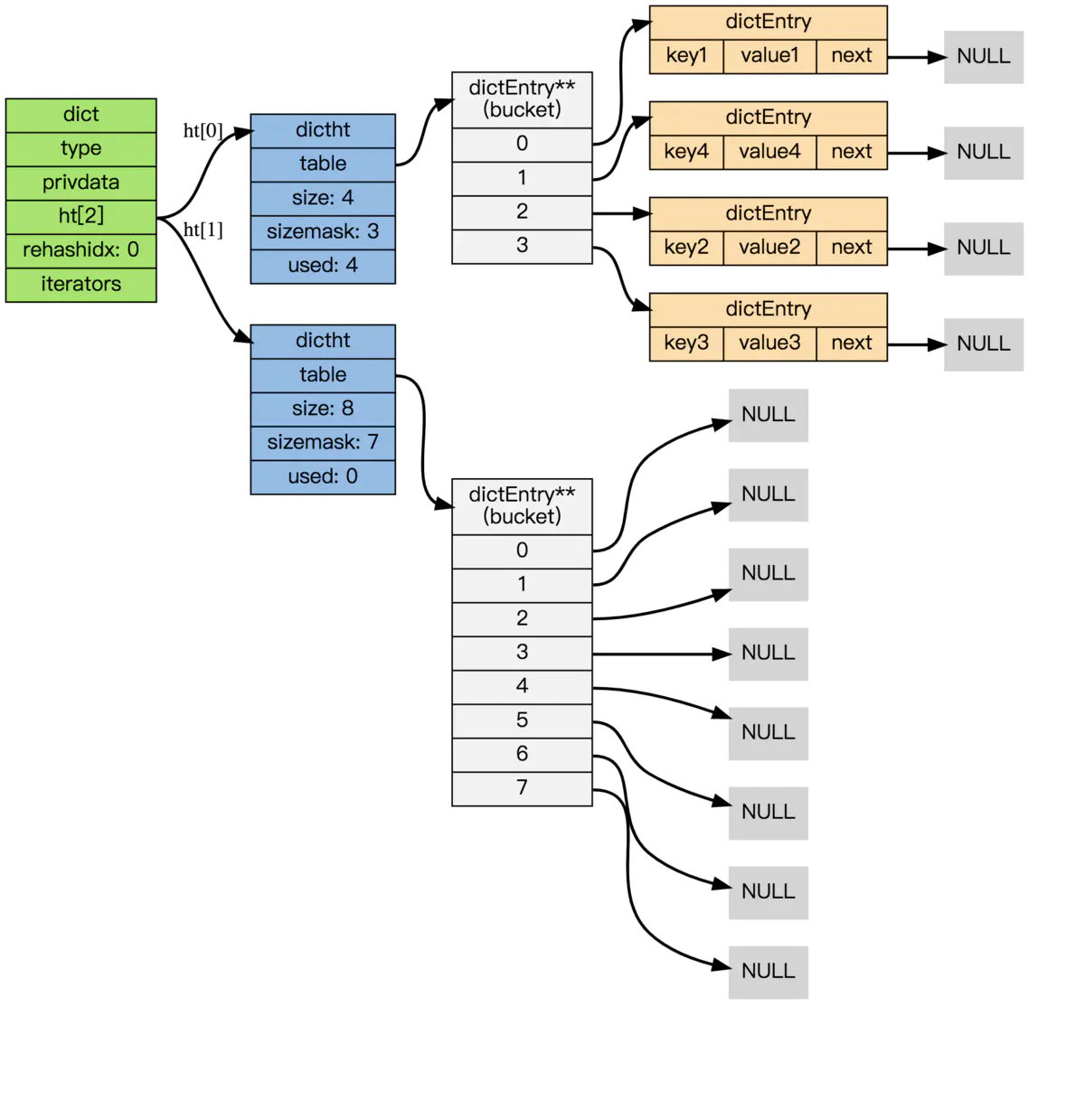
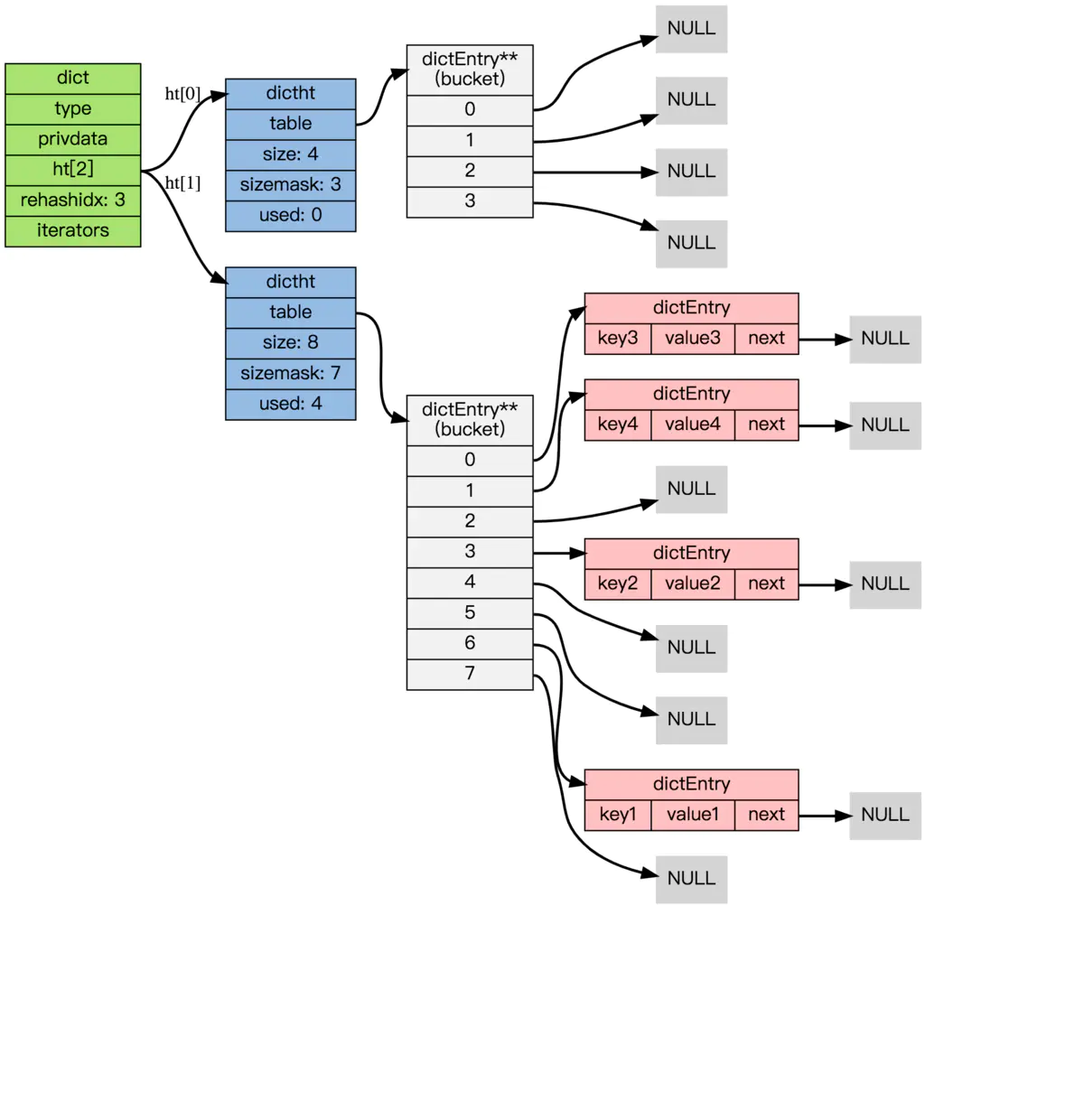
- dictht ht[2];两个哈希表(ht[2])。只有在rehash的过程中,ht[0]和ht[1]才都有效。而在平常情况下,只有ht[0]有效,ht[1]里面没有任何数据。上图表示的就是rehash进行到中间某一步时的情况。
- int rehashidx;当前rehash索引(rehashidx)。如果rehashidx = -1,表示当前没有在rehash过程中;否则,表示当前正在进行rehash,且它的值记录了当前rehash进行到哪一步了。
- int iterators;当前正在进行遍历的iterator的个数。这不是我们现在讨论的重点,暂时忽略。
dictht(dict hash table)哈希表结构
/*
* 哈希表
*/typedef struct dictht {
// 哈希表节点指针数组(俗称桶,bucket)
dictEntry **table;
// 指针数组的大小
unsigned long size;
// 指针数组的长度掩码,用于计算索引值
unsigned long sizemask;
// 哈希表现有的节点数量
unsigned long used;
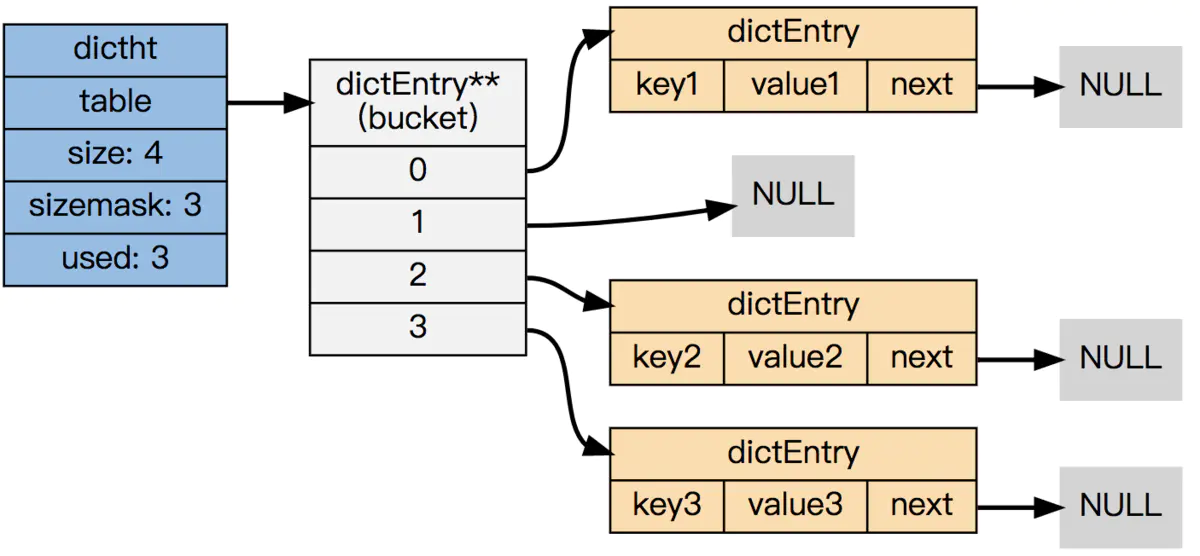
} dictht;dictht 定义一个哈希表的结构,包括以下部分:
- 一个dictEntry指针数组(table)。key的哈希值最终映射到这个数组的某个位置上(对应一个bucket)。如果多个key映射到同一个位置,就发生了冲突,那么就拉出一个dictEntry链表。
- size:标识dictEntry指针数组的长度。它总是2的指数次幂。
- sizemask:用于将哈希值映射到table的位置索引。它的值等于(size-1),比如7, 15, 31, 63,等等,也就是用二进制表示的各个bit全1的数字。每个key先经过hashFunction计算得到一个哈希值,然后计算(哈希值 & sizemask)得到在table上的位置。相当于计算取余(哈希值 % size)。
- used:记录dict中现有的数据个数。它与size的比值就是装载因子。这个比值越大,哈希值冲突概率越高。
dictEntry的结构
/*
* 哈希表节点
*/typedef struct dictEntry {
// 键
void *key;
// 值
union {
void *val;
uint64_t u64;
int64_t s64;
} v;
// 链往后继节点
struct dictEntry *next;
} dictEntry;dictEntry结构中包含k, v和指向链表下一项的next指针。k是void指针,这意味着它可以指向任何类型。v是个union,当它的值是uint64_t、int64_t或double类型时,就不再需要额外的存储,这有利于减少内存碎片。当然,v也可以是void指针,以便能存储任何类型的数据。
next 指向另一个 dictEntry 结构, 多个 dictEntry 可以通过 next 指针串连成链表, 从这里可以看出, dictht 使用链地址法来处理键碰撞: 当多个不同的键拥有相同的哈希值时,哈希表用一个链表将这些键连接起来。
dictht和dictEntry组合
如果再加上之前列出的 dict 类型,那么整个字典结构可以表示如下:
dict的创建(dictCreate)
dictCreate为dict的数据结构分配空间并为各个变量赋初值。其中两个哈希表ht[0]和ht[1]起始都没有分配空间,table指针都赋为NULL。这意味着要等第一个数据插入时才会真正分配空间。
添加新键值对到字典(dictAdd)
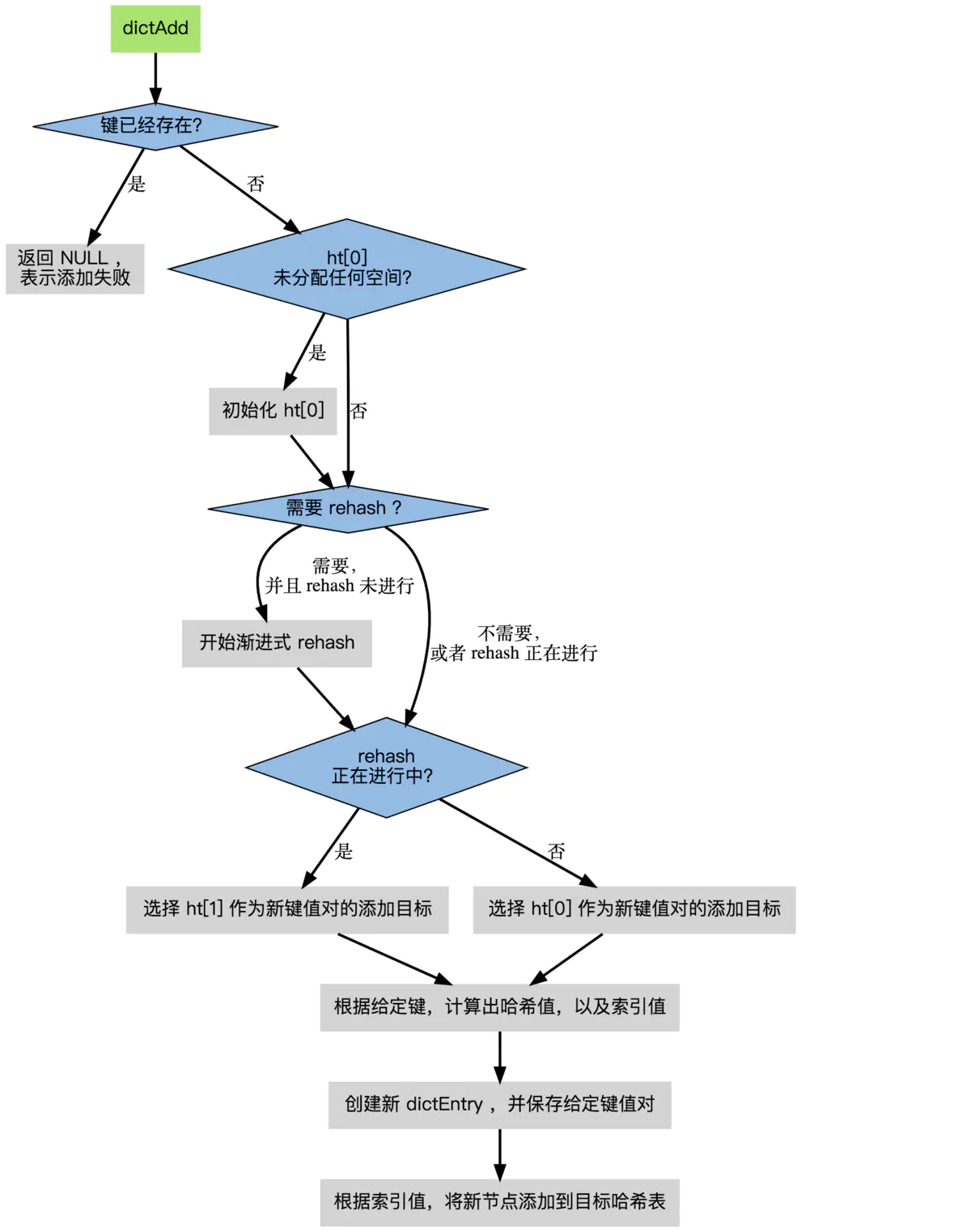
根据字典所处的状态, 将给定的键值对添加到字典可能会引起一系列复杂的操作:
- 如果字典为未初始化(即字典的 0 号哈希表的 table 属性为空),则程序需要对 0 号哈希表进行初始化;
- 如果在插入时发生了键碰撞,则程序需要处理碰撞;
- 如果插入新元素,使得字典满足了 rehash 条件,则需要启动相应的 rehash 程序;
当程序处理完以上三种情况之后,新的键值对才会被真正地添加到字典上。
添加新键值对时发生碰撞
在哈希表实现中, 当两个不同的键拥有相同的哈希值时, 称这两个键发生碰撞(collision), 而哈希表实现必须想办法对碰撞进行处理。
字典哈希表所使用的碰撞解决方法被称之为链地址法: 这种方法使用链表将多个哈希值相同的节点串连在一起, 从而解决冲突问题。
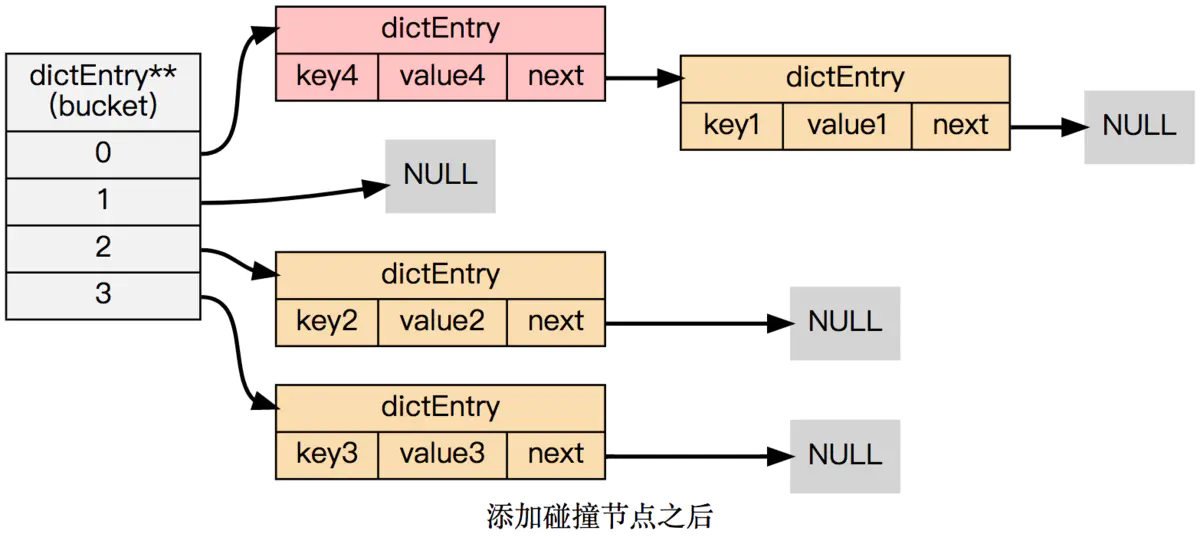
假设现在有一个带有三个节点的哈希表,如下图:
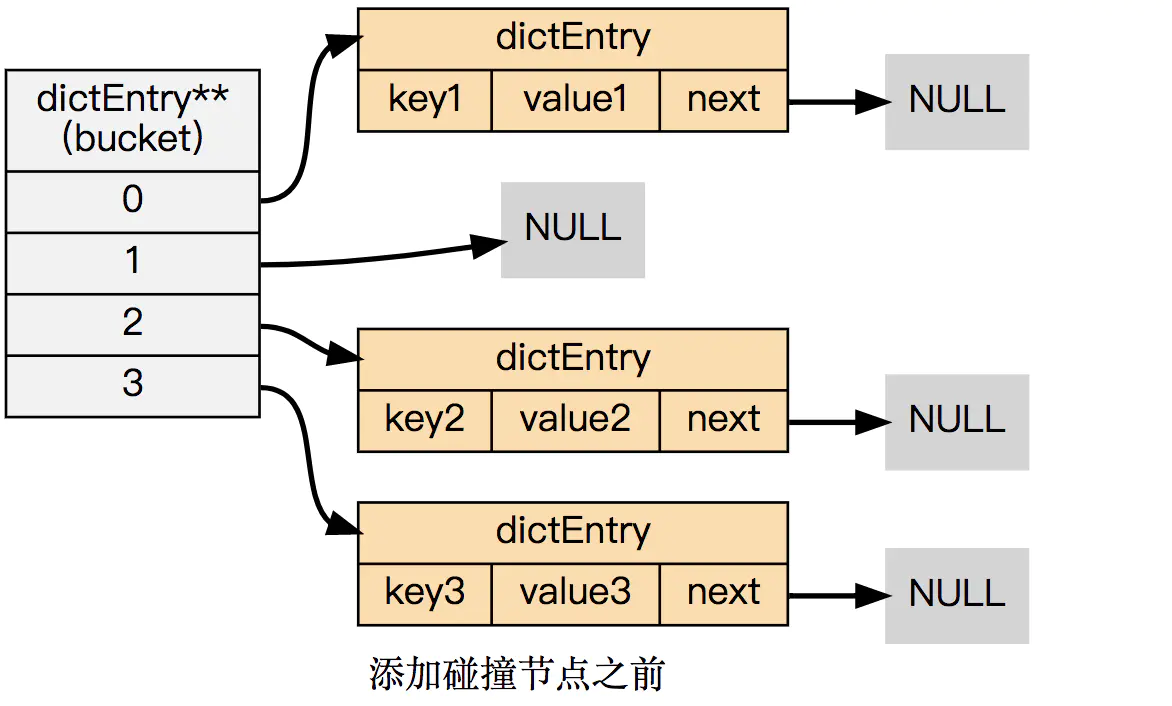
对于一个新的键值对 key4 和 value4 , 如果 key4 的哈希值和 key1 的哈希值相同, 那么它们将在哈希表的 0 号索引上发生碰撞。
通过将 key4-value4 和 key1-value1 两个键值对用链表连接起来, 就可以解决碰撞的问题:
添加新键值对时触发了 rehash
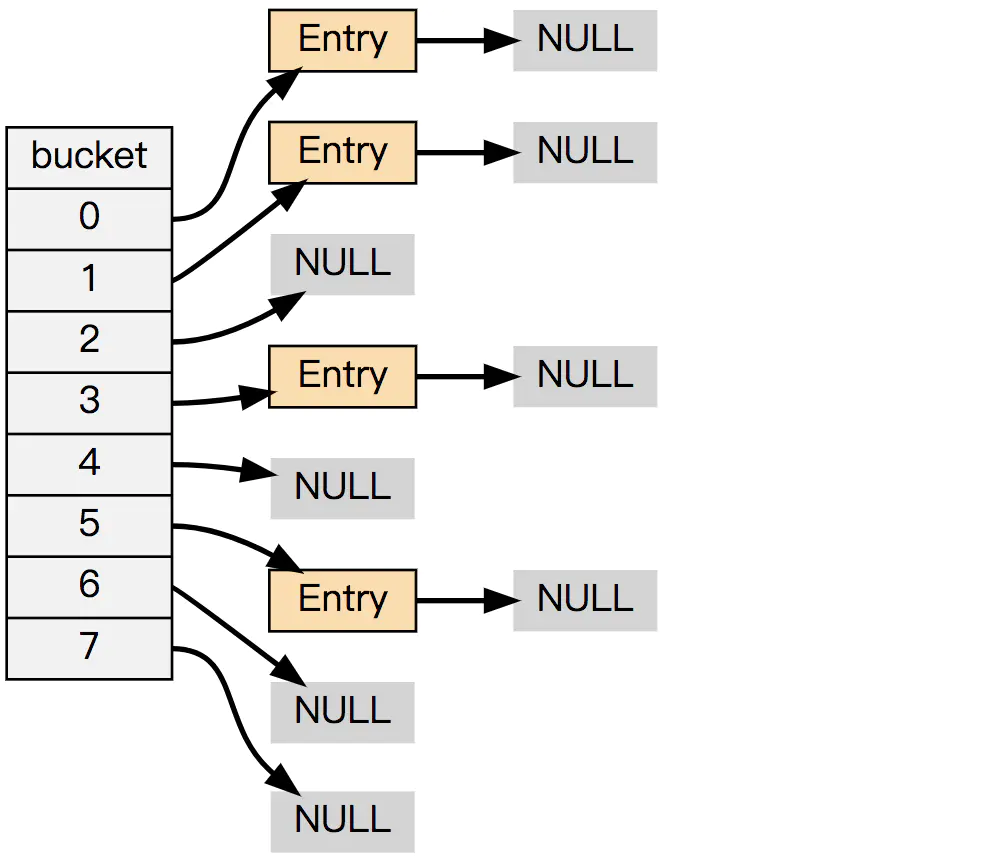
对于使用链地址法来解决碰撞问题的哈希表 dictht 来说, 哈希表的性能取决于大小(size属性)与保存节点数量(used属性)之间的比率:
哈希表的大小与节点数量,比率在 1:1 时,哈希表的性能最好;
如果节点数量比哈希表的大小要大很多的话,那么哈希表就会退化成多个链表,哈希表本身的性能优势便不复存在;
举个例子, 下面这个哈希表, 平均每次失败查找只需要访问 1 个节点(非空节点访问 2 次,空节点访问 1 次):
而下面这个哈希表, 平均每次失败查找需要访问 5 个节点:
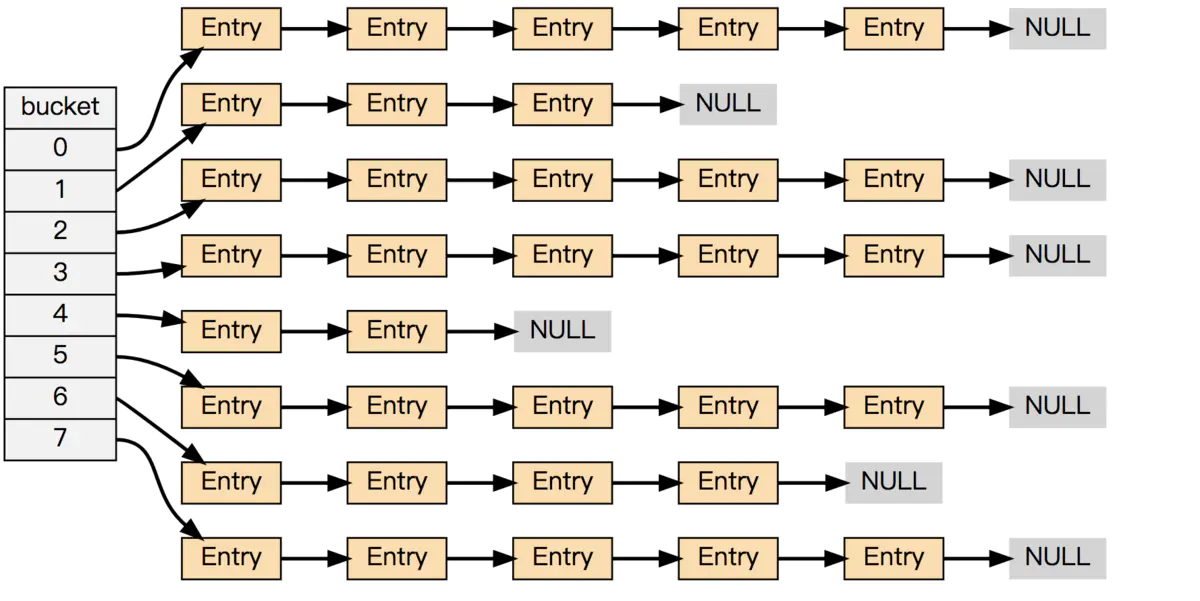
为了在字典的键值对不断增多的情况下保持良好的性能, 字典需要对所使用的哈希表(ht[0])进行 rehash 操作: 在不修改任何键值对的情况下,对哈希表进行扩容, 尽量将比率维持在 1:1 左右。
dictAdd 在每次向字典添加新键值对之前, 都会对哈希表 ht[0] 进行检查, 对于 ht[0] 的 size 和 used 属性, 如果它们之间的比率 ratio = used / size 满足以下任何一个条件的话,rehash 过程就会被触发:
- 自然 rehash : ratio >= 1 ,且变量 dict_can_resize 为true。
- 强制 rehash : ratio 大于变量 dict_force_resize_ratio (目前版本中, dict_force_resize_ratio 的值为 5 )。
Redis dictht的负载因子
我们知道当HashMap中由于Hash冲突(负载因子)超过某个阈值时,出于链表性能的考虑、会进行扩容,Redis dict也是一样。
一个dictht 哈希表里,核心就是一个dictEntry数组,同时用size记录了数组大小,用used记录了所有记录数。
dictht的负载因子,就是used与size的比值,也称装载因子(load factor)。这个比值越大,哈希值冲突概率越高。当比值[默认]超过5,会强制进行rehash。
Rehash 执行过程
字典的 rehash 操作实际上就是执行以下任务:
- 创建一个比 ht[0]->table 更大的 ht[1]->table ;
- 将 ht[0]->table 中的所有键值对迁移到 ht[1]->table ;
- 将原有 ht[0] 的数据清空,并将 ht[1] 替换为新的 ht[0] ;
经过以上步骤之后, 程序就在不改变原有键值对数据的基础上, 增大了哈希表的大小。
dict的rehash 本质就是扩容,就是将数组+链表结构中的数组扩容;
这个过程,需要开辟一个更大空间的数组,将老数组中每个非空索引的bucket,搬运到新数组;搬运完成后再释放老数组的空间。
1. 开始 rehash
这个阶段有两个事情要做:
- 设置字典的 rehashidx 为 0 ,标识着 rehash 的开始;
- 为 ht[1]->table 分配空间,大小至少为 ht[0]->used 的两倍;
这时的字典是这个样子:

2. Rehash 进行中
在这个阶段, ht[0]->table 的节点会被逐渐迁移到 ht[1]->table , 因为 rehash 是分多次进行的(细节在下一节解释), 字典的 rehashidx 变量会记录 rehash 进行到 ht[0] 的哪个索引位置上。
注意除了节点的移动外, 字典的 rehashidx 、 ht[0]->used 和 ht[1]->used 三个属性也产生了变化。
3. 节点迁移完毕
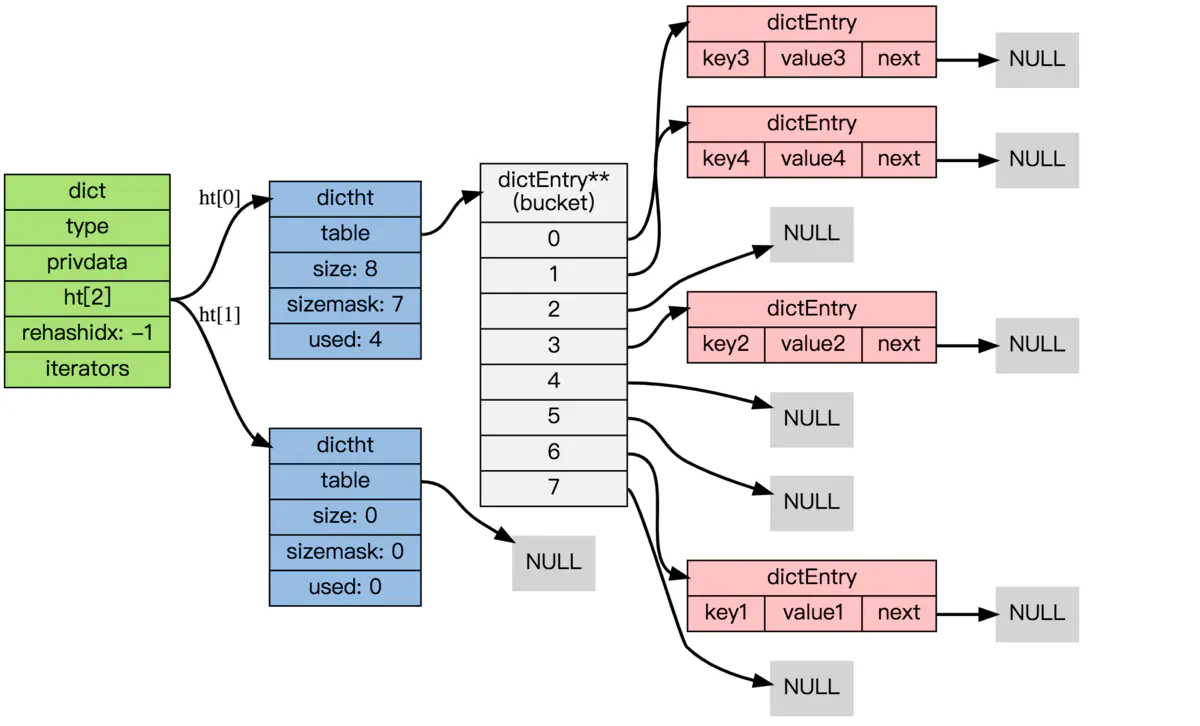
到了这个阶段,所有的节点都已经从 ht[0] 迁移到 ht[1] 了:
4. Rehash 完毕
在 rehash 的最后阶段,程序会执行以下工作:
- 释放 ht[0] 的空间;
- 用 ht[1] 来代替 ht[0] ,使原来的 ht[1] 成为新的 ht[0] ;
- 创建一个新的空哈希表,并将它设置为 ht[1] ;
- 将字典的 rehashidx 属性设置为 -1 ,标识 rehash 已停止;
以下是字典 rehash 完毕之后的样子:
增量/渐进式rehash
- rehash的过程,会使用两个哈希表,创建了一个更大空间的ht[1],此时会造成内存陡增;
- rehash的过程,可能涉及大量KV键值对dictEntry的搬运,耗时较长;
如果这个 rehash 过程必须将所有键值对迁移完毕之后才将结果返回给用户, 这样的处理方式将不满足Redis高效响应的特性。
rehash会产生的问题,主要层面就是内存占用陡增、和处理耗时长的问题,基于这两点,还会带来其他影响。
为了解决这些问题, Redis 使用了incremental rehashing,是一种 增量/渐进式的 rehash 方式: 通过将 rehash 分散到多个步骤中进行, 从而避免了集中式的计算/节点迁移。
dictAdd 添加键值对到dict,检查到需要进行rehash时,会将dict.rehashidx 设置为 0 ,标识着 rehash 的开始;
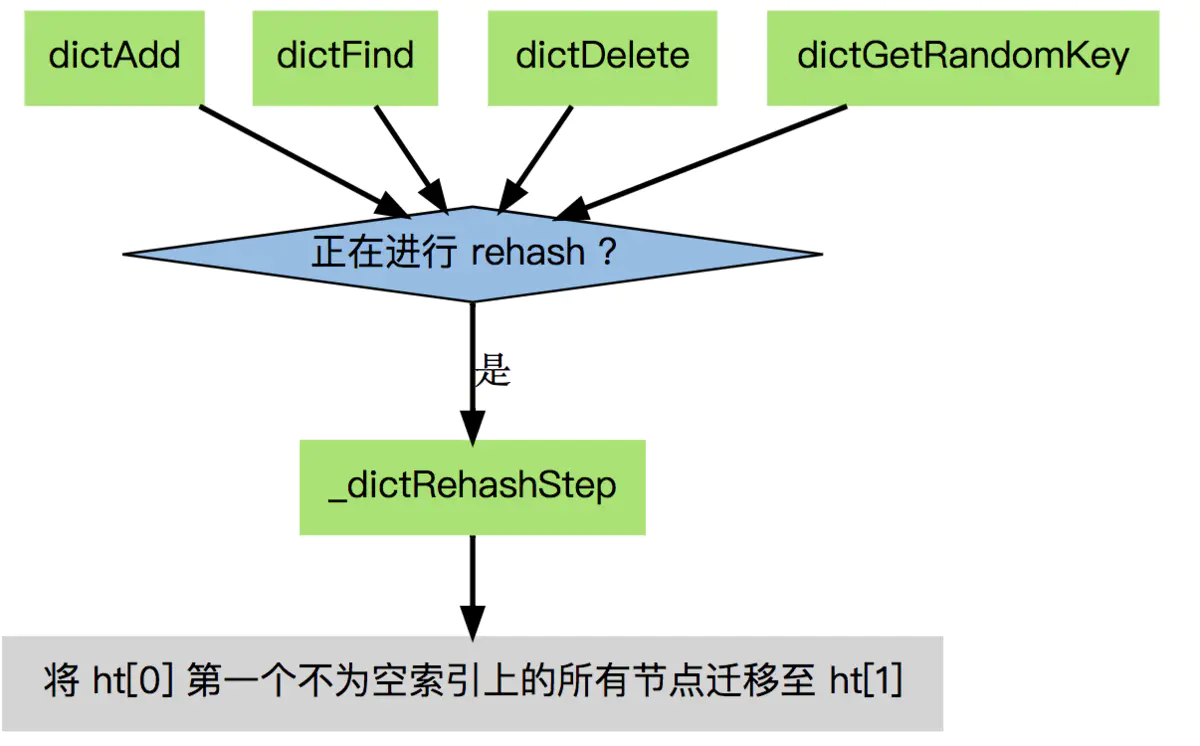
后续请求,在执行add、delete、find操作时,都会判断dict是否正在rehash,如果是,就执行_dictRehashStep()函数,进行增量rehash。
每次执行 _dictRehashStep , 会将ht[0]->table 哈希表第一个不为空的索引上的所有节点就会全部迁移到 ht[1]->table 。
也就是在某次dictAdd 添加键值对时,触发了rehash;后续add、delete、find命令在执行前都会检查,如果dict正在rehash,就先不急去执行自己的命令,先去帮忙搬运一个bucket;
搬运完一个bucket,再执行add、delete、find命令 原有处理逻辑。
下面我们通过dict的查找(dictFind)来看渐进式rehash过程;
dict的查找(dictFind)
- 如果当前正在进行rehash,那么将rehash过程向前推进一步(即调用_dictRehashStep)。实际上,除了查找,插入和删除也都会触发这一动作。这就将rehash过程分散到各个查找、插入和删除操作中去了,而不是集中在某一个操作中一次性做完。
- 计算key的哈希值(调用dictHashKey,里面的实现会调用前面提到的hashFunction)。
- 先在第一个哈希表ht[0]上进行查找。在table数组上定位到哈希值对应的位置(如前所述,通过哈希值与sizemask进行按位与),然后在对应的dictEntry链表上进行查找。查找的时候需要对key进行比较,这时候调用dictCompareKeys,它里面的实现会调用到前面提到的keyCompare。如果找到就返回该项。否则,进行下一步。
- 判断当前是否在rehash,如果没有,那么在ht[0]上的查找结果就是最终结果(没找到,返回NULL)。否则,在ht[1]上进行查找(过程与上一步相同)。
dictAdd、dictDelete、dictFind在rehash过程中的特殊性
在哈希表进行 rehash 时, 字典还会采取一些特别的措施, 确保 rehash 顺利、正确地进行:
- 因为在 rehash 时,字典会同时使用两个哈希表,所以在这期间的所有查找dictFind、删除dictDelete等操作,除了在 ht[0] 上进行,还需要在 ht[1] 上进行。
- 在执行添加操作dictAdd时,新的节点会直接添加到 ht[1] 而不是 ht[0] ,这样保证 ht[0] 的节点数量在整个 rehash 过程中都只减不增。
dict的缩容
上面关于 rehash 的章节描述了通过 rehash 对字典进行扩展(expand)的情况, 如果哈希表的可用节点数比已用节点数大很多的话, 那么也可以通过对哈希表进行 rehash 来收缩(shrink)字典。
收缩 rehash 和上面展示的扩展 rehash 的操作几乎一样,执行以下步骤:
- 创建一个比 ht[0]->table 小的 ht[1]->table ;
- 将 ht[0]->table 中的所有键值对迁移到 ht[1]->table ;
- 将原有 ht[0] 的数据清空,并将 ht[1] 替换为新的 ht[0] ;
小结
Redis的dict最显著的一个特点,就在于它的rehash。它采用了一种称为增量式(incremental rehashing)的rehash方法,在需要扩容时避免一次性对所有key进行rehash,而是将rehash操作分散到对于dict的各个增删改查的操作中去。
这种方法能做到每次只对一小部分key进行rehash,而每次rehash之间不影响dict的操作。dict之所以这样设计,是为了避免rehash期间单个请求的响应时间剧烈增加,这与前面提到的“快速响应时间”的设计原则是相符的。
- Redis的dict也是使用数组+链表实现;
- 当冲突增加、链表增长,也是采用rehash(数组扩容)来将链表变短;
- dict数组扩容,也是按2的指数次幂,使用位运算,替代求余操作,计算更快;
- 渐进式rehash,其实是辅助式的;不是让触发rehash的一个人搬运完所有dictEntry,而是让后来者一起参与搬运。